I recently acquired and restored a Commodore PET 4016, so I thought it might be fun to try replacing the CPU with an MCL65+ 6502 drop-in replacement board to see how it performs. I also was interested to see how much faster the PET can operate when running in some acceleration modes!
My PET 4016, which normally contains 16 KB of DRAM, was upgraded to 32 KB by a previous user. This motherboard had holes drilled in the second DRAM bank by Commodore to keep users from upgrading their 4016 machines to 32 KB in and to force them to buy a PET 4032. This user simple hand-soldered the drilled out connections and upgraded it anyway!
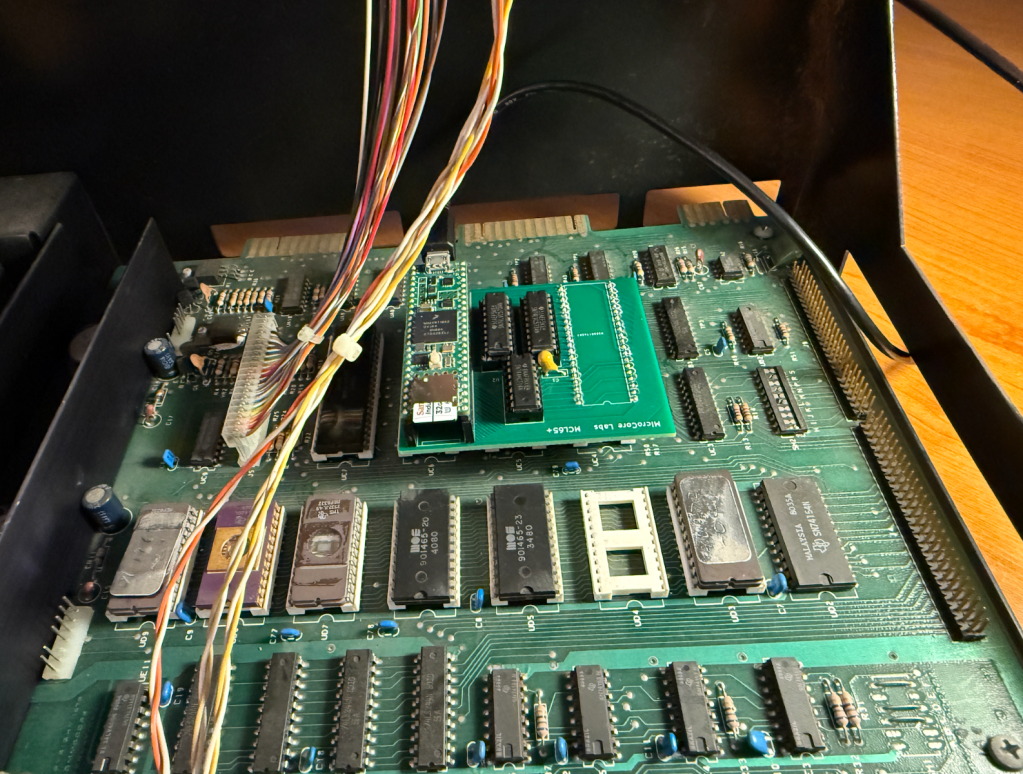
As soon as I installed the MCL65+ it was able to booting the PET and I was able to run a small BASIC program. It had no trouble replacing the 6502 in the computer.

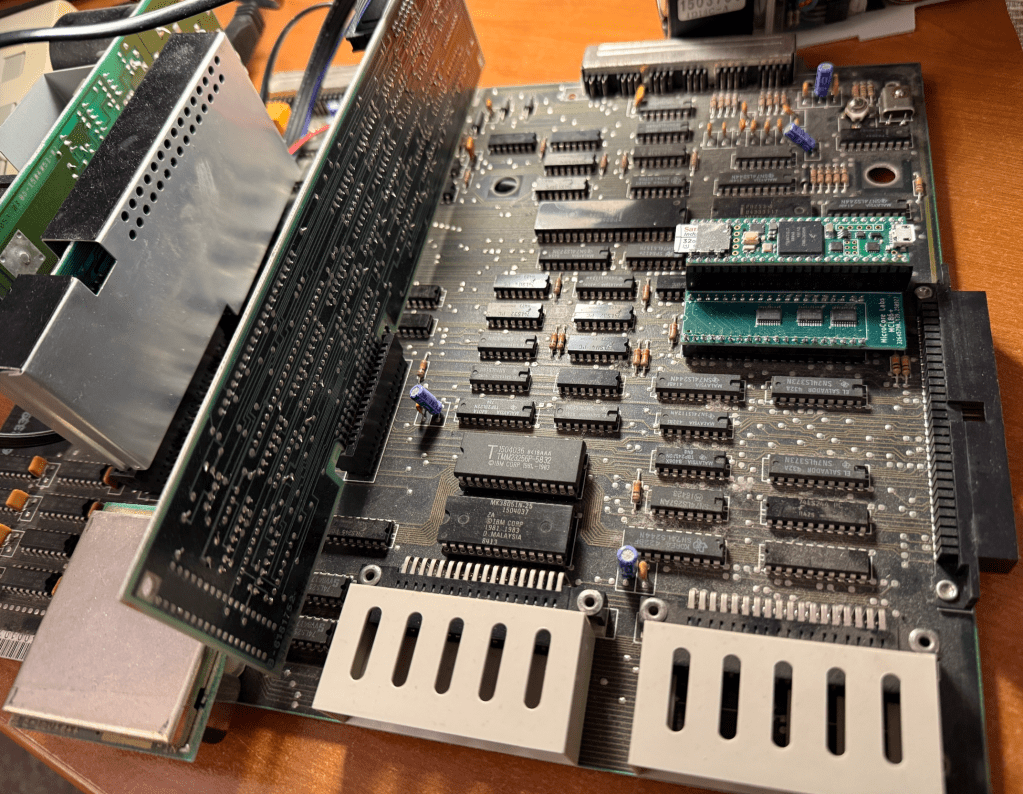
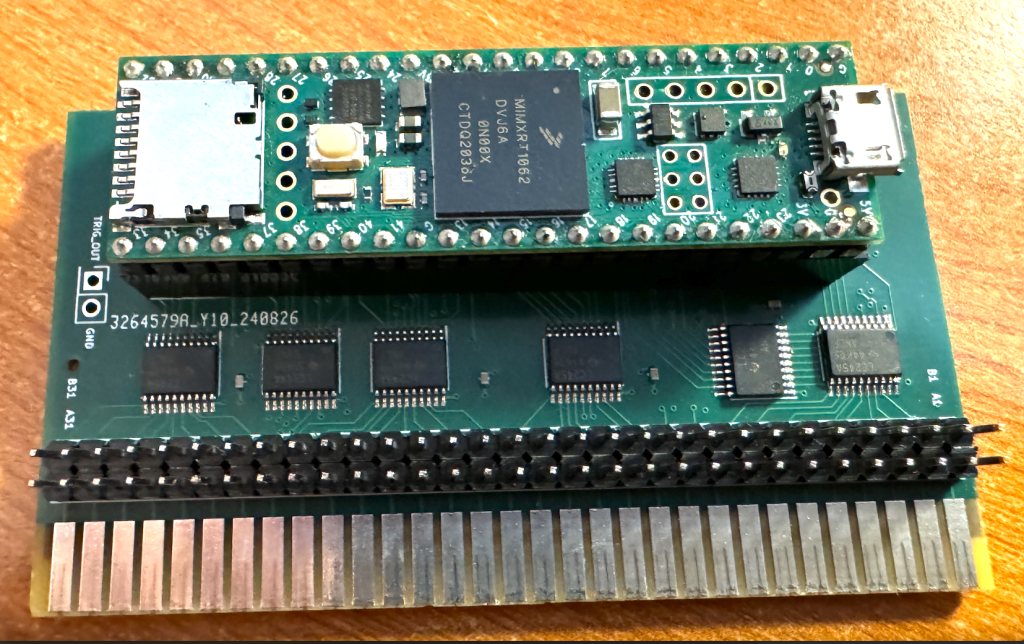
This is the MCL65+ installed in the computer’s CPU socket – replacing the 6502.
The next step was to test a theory that I had – I wondered if a .PRG program file could be loaded and run directly from the PET’s memory without needing a disk drive. This turned out to be the case!
The first two bytes of a .PRG binary file contains the memory address to locate the program and the rest of the file is simple the stream of binary data for the program. I simple converted the .PRG files to a string of hex data, placed it in an array in the MCL65+ code, and loaded it when the user presses a key.
Once the program was loaded I just needed to type RUN in BASIC and the program started up!



Being able to replace the 6502 and run programs directly from the internal memory was interesting, but I though it would be even more amusing to try some acceleration modes of the MCL65+ to see how fast we can run a Commodore PET.
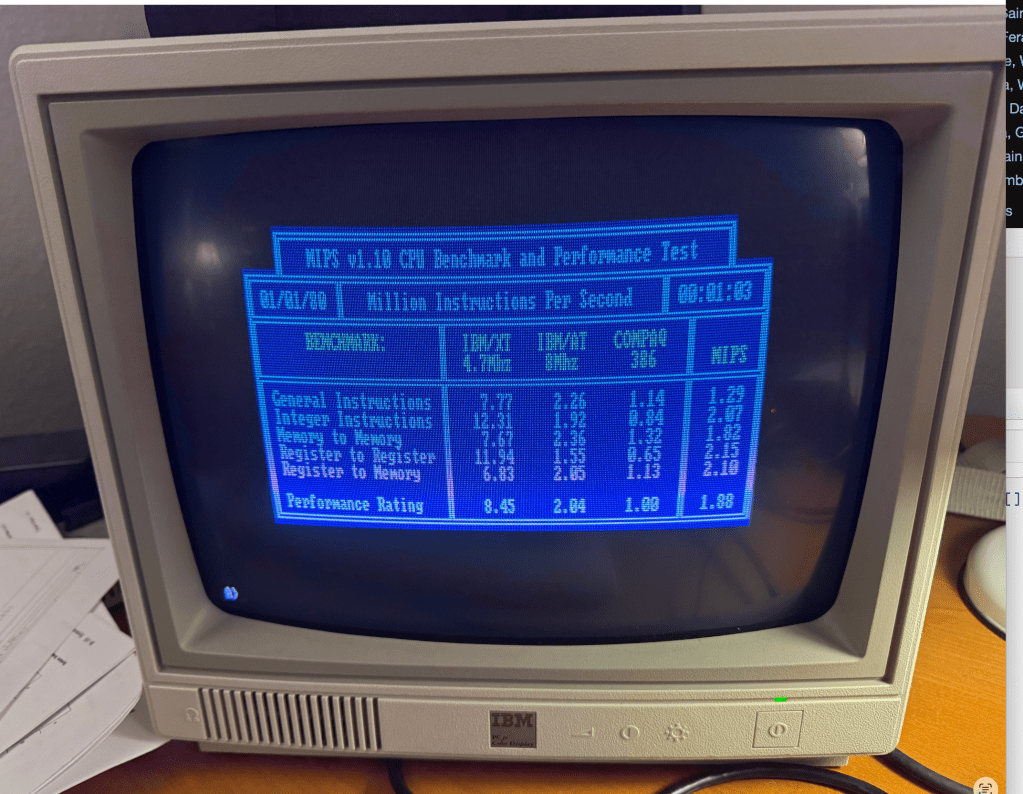
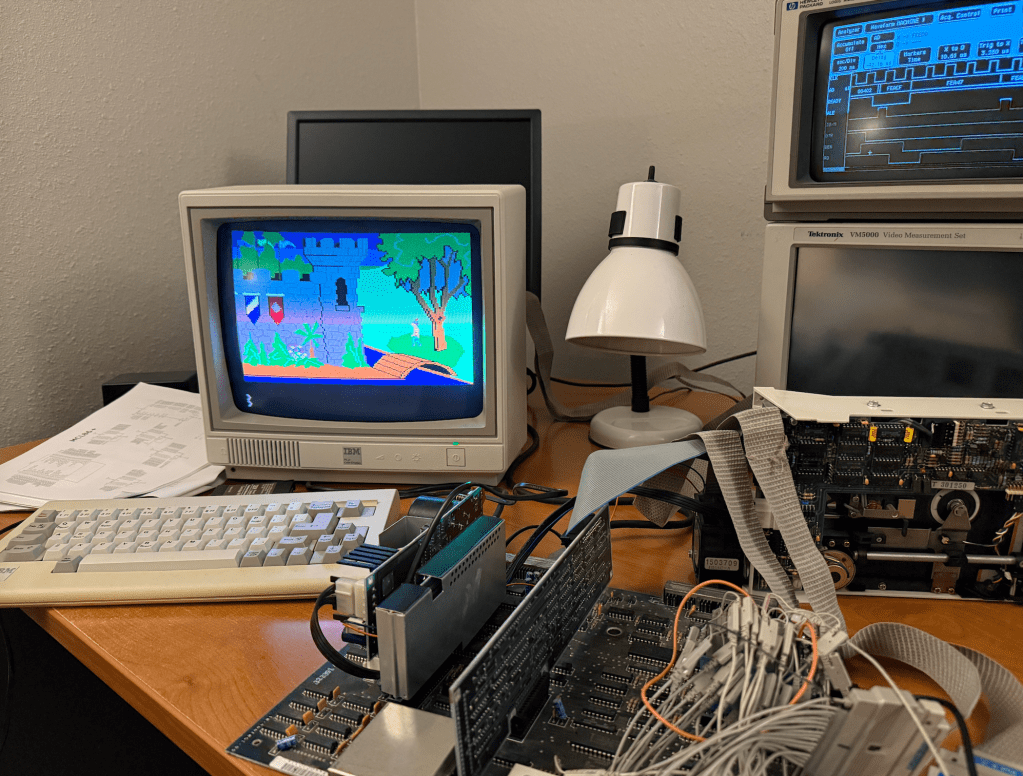
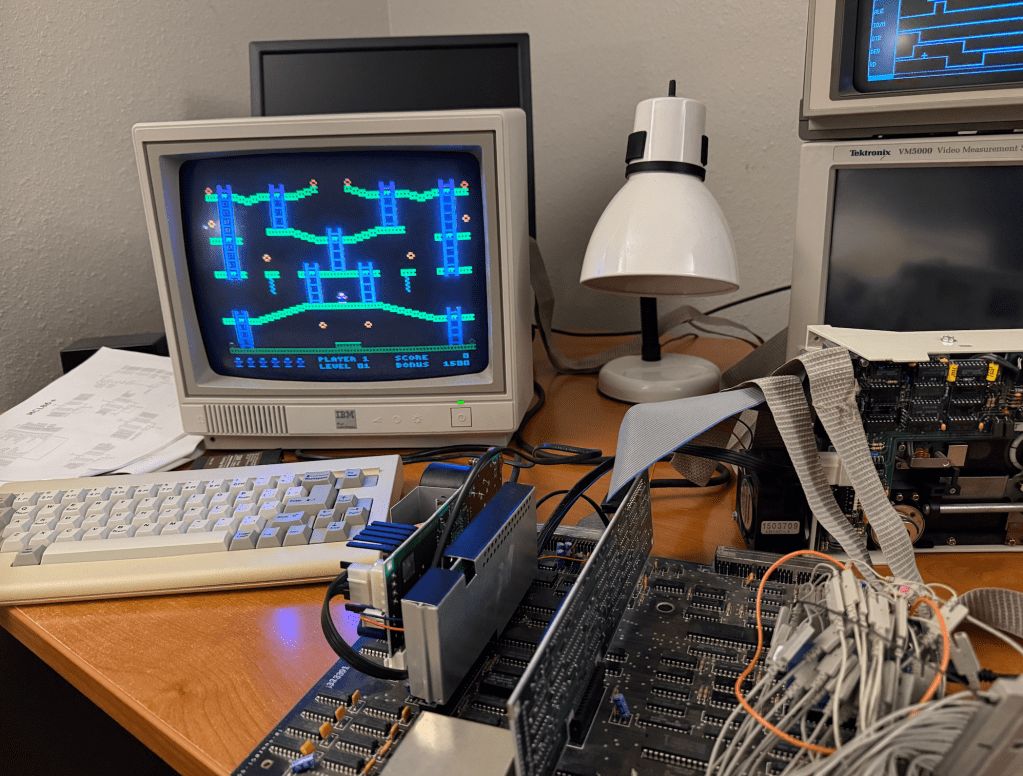
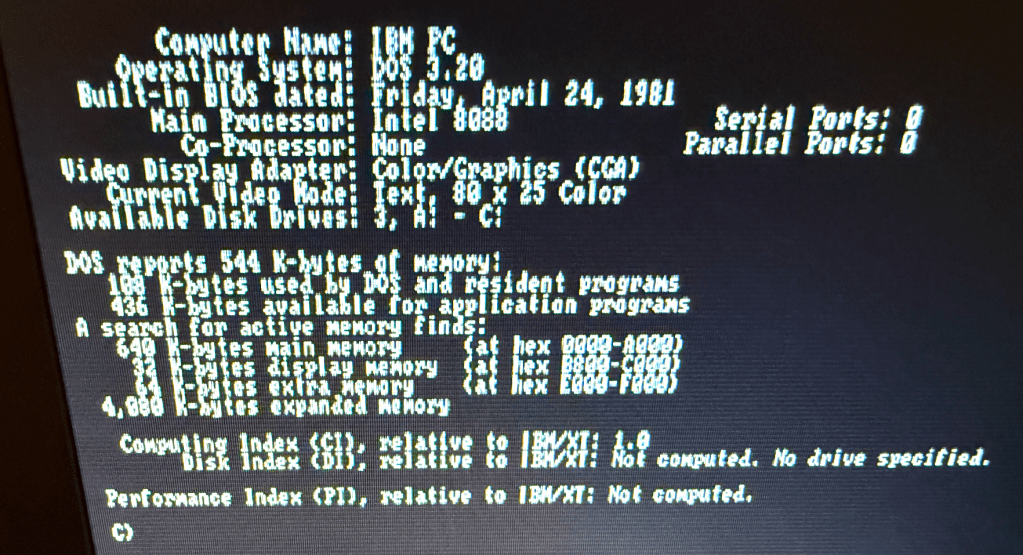
Here is a video demonstration of me running a few programs and diagnostics using a few acceleration modes:
The MCL65+ uses a Teensy 4.1 which contains 1 MB of memory so it can easily emulate all of the PET’s ROM and RAM. With just a few line of code it can emulate different PET ROM images and diagnostic ROMs, support different sizes of system memory, and can mirror these memories in a cycle accurate or accelerated manners.
The video shows the computer running three acceleration modes. Mode-1, Mode-2, and Mode-3.
Mode-1 is cycle accurate where the MCL65+ runs just like a stock 6502 and is cycle accurate for both reads and writes. Mode-2 is cycle accurate on writes but accelerated on reads. Mode-3 is accelerated on both reads and writes. The accelerated modes store all of the computer’s RAM and ROM inside of the MCL65+ internal memory and run it at the maximum speed of the Teensy which is 900 MHz and clock accuracy is not observed.
I believe this machine is now the World’s Fastest Commodore PET!
You can reach me at: mailto:eastwood90@hush.com